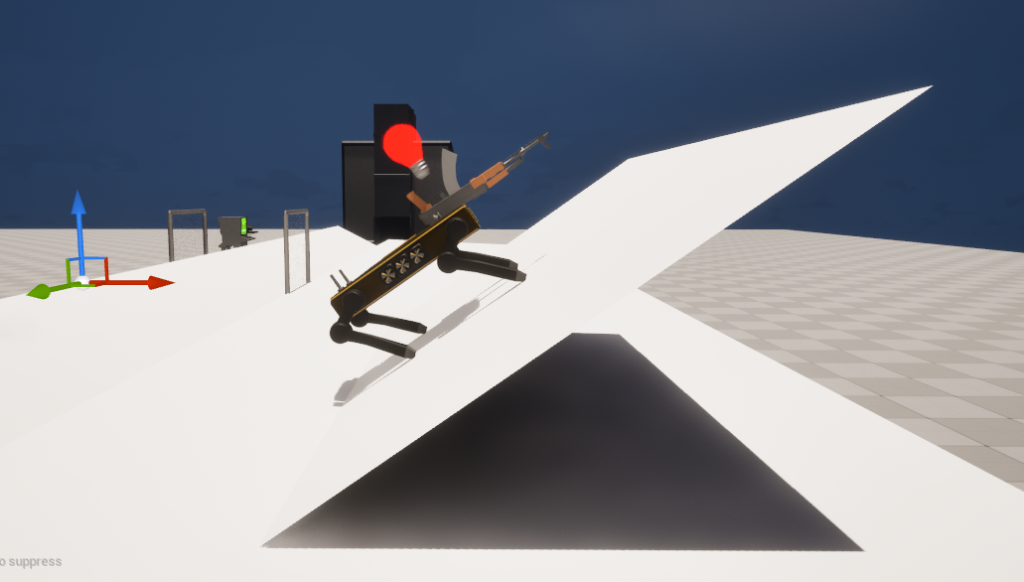
I spent WAY to long getting leg ground detection working for the patrol bots: It still isn’t that great but it’s probably as good as I wanted it to be. The big thing is that I can put the bots on ramps and they look kinda right: The basic idea too complicated: essentially you draw […]