So I’ve been wanting to make the robots more of a physics simulations since I started the project. However, I’ve had a hard time of figuring out why I couldn’t get the physics-based-animation effect I was looking for (See https://willkolb.com/?p=915). I thought I had a decent method which made the ragdolls of the robots stable but I could never get the full on real-time physics simulation working. I have also had constant issues with control/modular rigs and started ignoring this concept all together. However, in my infinite stubbornness I tried re-rigging the patrol bot again.

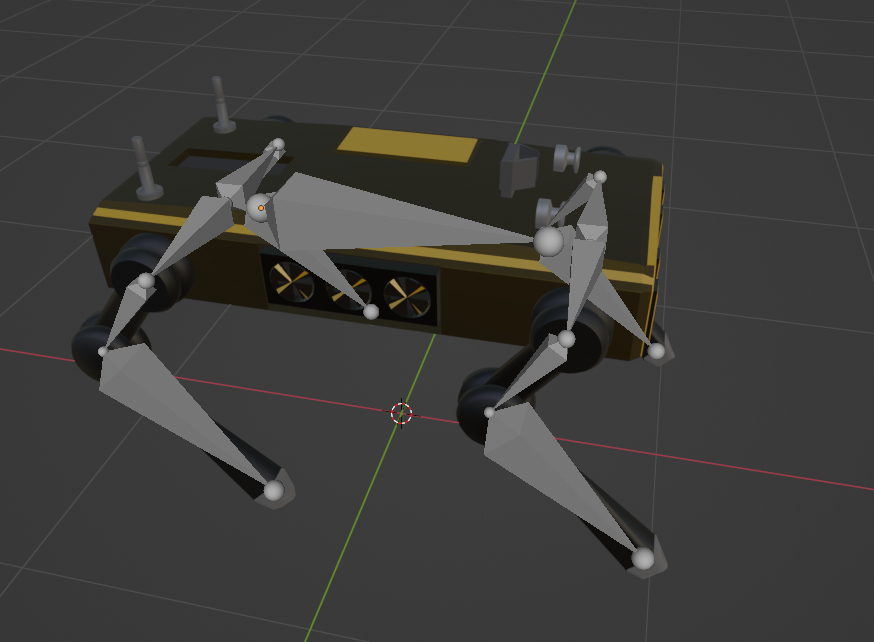
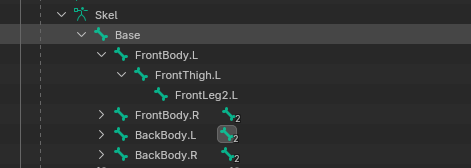
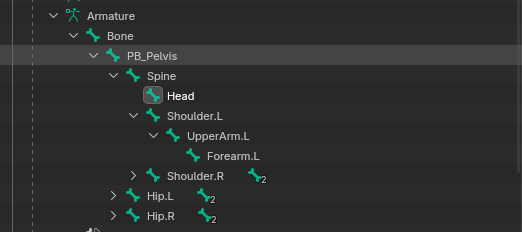
It’s hard to tell just from pictures but the big differences are: the Root bone under the robot, the tail and head portions, and the overall flow goes from tail to head rather than spine to each leg. It’s easier to see differences when looking at the hierarchy differences:
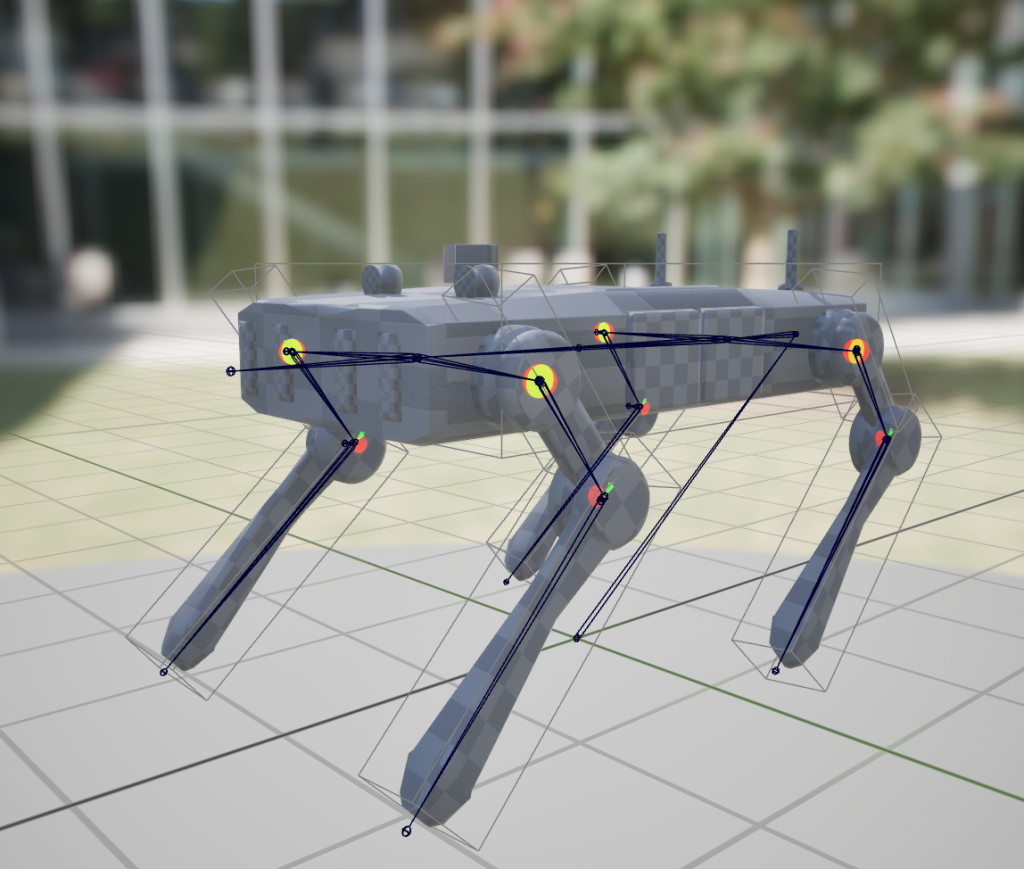
Now what this enables is that unreal can actually tell what’s going on for the bot. The biggest benefit is that physics simulations start to become much more stable:
Also I was able to implement a control rig with way more body control than I had before.
This should enable better and more natural style animations. Specifically the walking animations, jump animations, aiming pitch/yaw and hit reactions should all be much more in tune with the rest of the game.
However now that I’ve re-rigged the entire bot I’ll probably need to recreate ALL of the animations….
On the mapping/animation front: I’ve been listening to a bunch of the quake 1 soundtrack:
and a bunch of pre-Year Zero Nine Inch Nails and now I’m feeling a low-poly rusty ascetic for the game. However, I think getting the “game” part finished first is still my priority.
In other news: my 555 synth project is still moving I just had to get some flux and a new solder tip. Progress is being made…